Welcome
We are a research group within CMVS and lead by Prof. Janne Heikkilä. 3D computer vision has been one of the core research areas in CMVS since early 1990’s. This research has resulted in many novel methods and software tools that have been widely used in the research community and companies.
During the last few years our focus has been in 3D computer vision techniques that enable more advanced features in augmented reality applications, where real and virtual objects co-exist in the same environment. Wearable computers such as Google Glass have created a strong demand for such technology. One of the fundamental problems investigated in our work is accurate localization of the user with respect to the environment. Other important research problems include estimation of the 3D scene structure and building a dense 3D model from multiple images.
Our group is focused on camera calibration, 3D reconstruction and 3D scene understanding.
Camera calibration
Geometry is an important aspect of computer vision. The laws of geometry and optics describe how the three-dimensional world is imaged on the camera sensor and, hence, an understanding of imaging geometry is important for the development of automatic image analysis methods. Geometric camera calibration is an important topic because it is a prerequisite for imagebased metric 3D measurements, and we have a strong expertise in that field.
3D Reconstruction
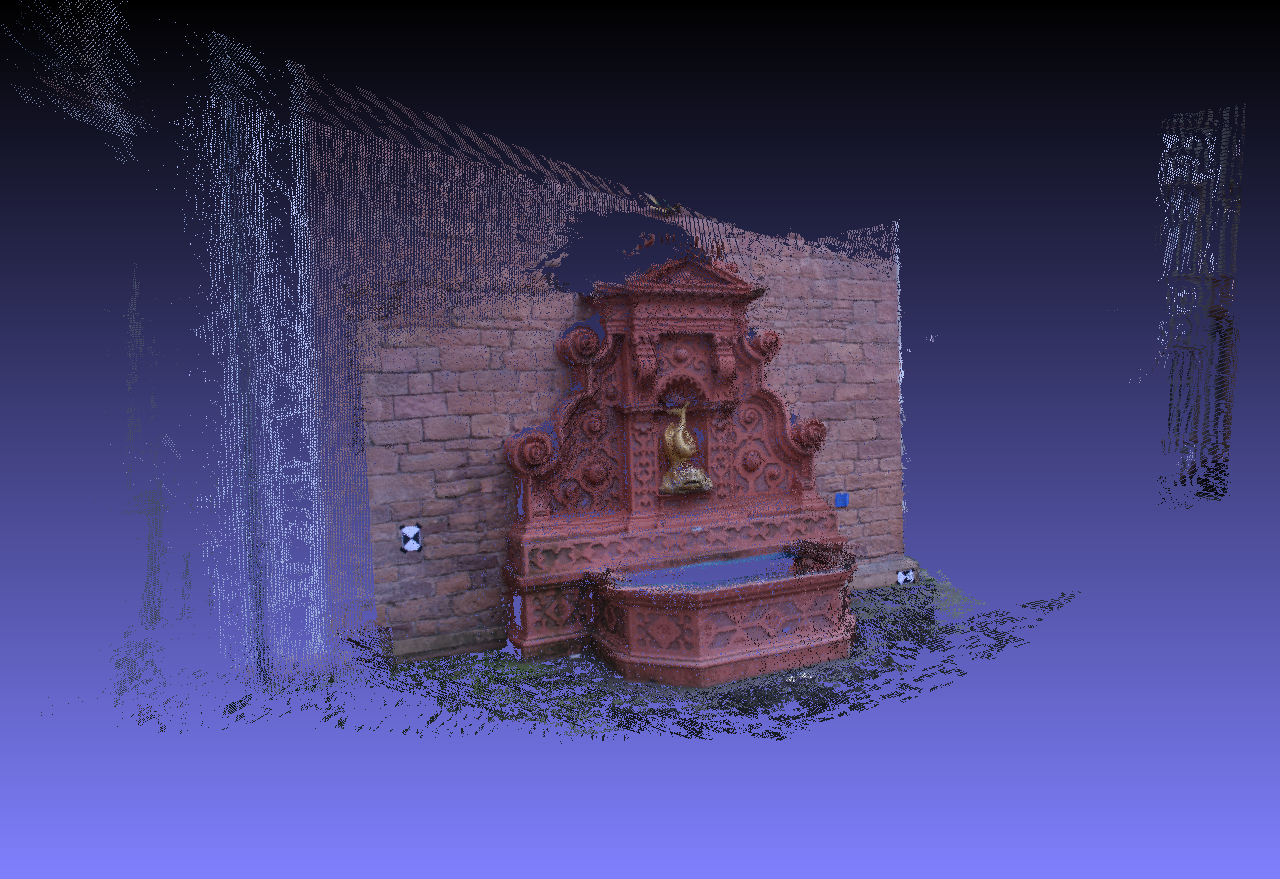
Automatically acquiring a three-dimensional model of a scene from multiple photographic images is an important research area in computer vision. During the last few years, we have also focused on 3D modeling from point clouds produced with image-based 3D reconstruction techniques.
3D Scene Understanding
3D scene understanding is an important area in 3D vision. Here we mainly focus on the indoor scene understanding. We are exploring the segmentaion methods of point clouds using deep learning methods, and the recent 3D representations like 3D gaussian splatting.
News!
2024-10: One paper was accepted to WACV2025, congrats to Haidong!
2024-9: Guiyu joined the team!
2024-2: Haidong joined the team!