Copyright (C) 2004-2008 Juho Kannala <jkannala@ee.oulu.fi>
Last updated: 2008-12-16
This is a camera calibration toolbox for Matlab which can be used for calibrating several different kinds of central cameras. A central camera is a camera which has a single effective viewpoint. The toolbox has been successfully used for both conventional and omnidirectional cameras such as fish-eye lens cameras and catadioptric cameras. The calibration is based on viewing a planar calibration object. The intrinsic and extrinsic camera parameters are estimated from control point correspondences between the calibration plane and calibration images. This toolbox is a result of research that has been carried out in the Laboratory of Computational Engineering at the Helsinki University of Technology and in the Machine Vision Group at the University of Oulu.
The most important changes are:
The first version is available here.
This software is distributed under the GNU General Public License (version 2 or later); refer to the file License.txt, included with the software, for details.
Please use the following citation if you use this software in your work.
Toolbox: calibration_v23.tar.gz (calibration_v22.tar.gz)
Demo: fisheyedemo.tar.gz
Copy all the m-files into a directory and add it to your MATLABPATH. Matlab version 6.5 or later with the Image Processing Toolbox and Optimization Toolbox is required.
To run the demo extract the data from the above package into a directory and execute function FISHEYEDEMO.
There are two ways of using the toolbox:
For more instructions see the README file.
You can use either one of the following two calibration patterns which have aspect ratios 16:9 and 4:3. For example, you can display the pattern on a flat screen display by using the full screen viewing mode of Acrobat Reader. The necessary distance ratios are given in the following configuration file. (The absolute metric dimensions of the displayed pattern are not necessary for the internal camera calibration. In this case, only the ratio between the control point radius and the gap of neighboring control points is significant. Optionally, in order to speed up the computation, you can use the pointlike approximation and set the radius of the control points to zero.)
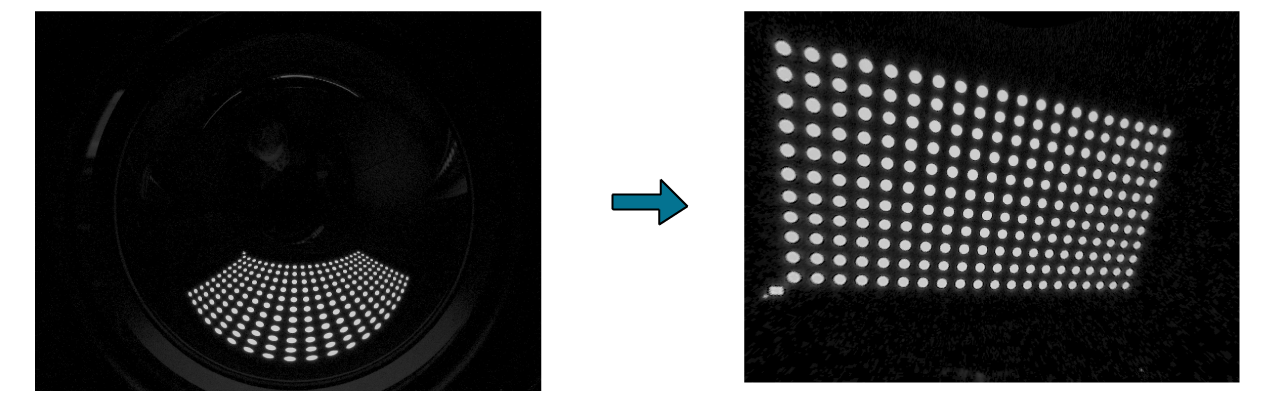
Catadioptric camera:
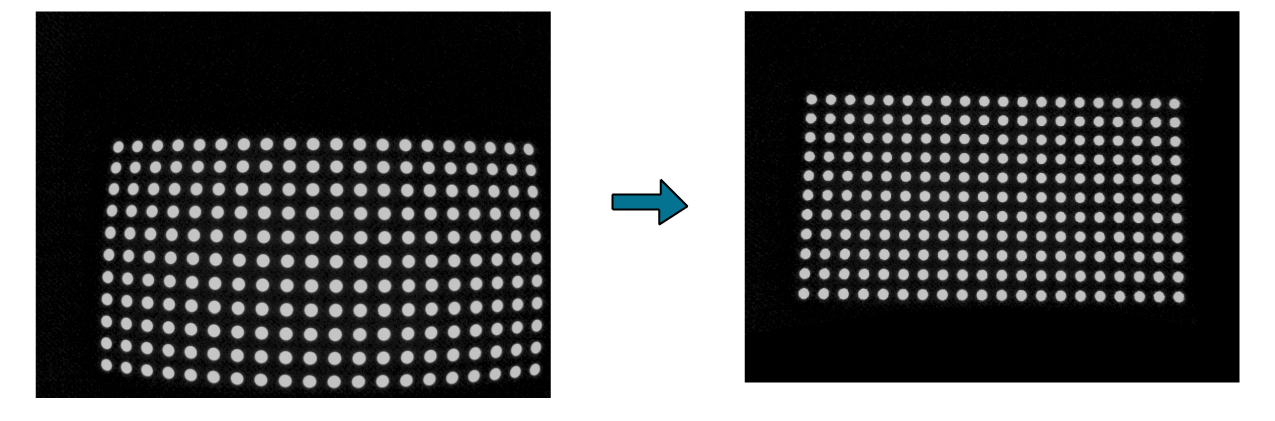
Wide-angle lens camera: